Forward And Backward Reaching Inverse Kinematics (前方後方到達インバース キネマティクス) (すなわち FABRIK) は、任意の長さのボーンのチェーンで機能する IK ソルバです (最低リンク数が 2)。
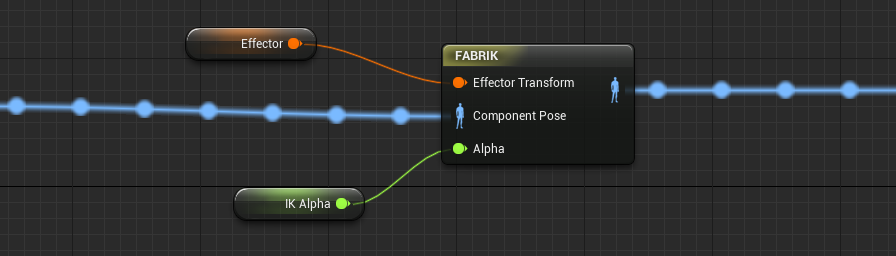
FABRIK を使用するには、まず FABRIK ノードを Animation ブループリント の AnimGraph へ追加します (上図参照)。
一度追加すると、Component Pose に加えて、このノードは Effector Transform を取り込みます。これは、絶対または相対の(同じスケルトンの別のボーンに基づきます) Transform です。End Effector の設定は TwoBone_IK ノードの設定と非常に似ています。
適用されている Skeletal Control の現在の強度を判定するために、FABRIK ノードは float Alpha を取り込みますが、これはノード自体で設定するか、またはfloat 変数で設定します。
FABRIK ノードの [Details (詳細)] パネル内には、ソルバ機能を調整するために使用可能な追加設定があります。
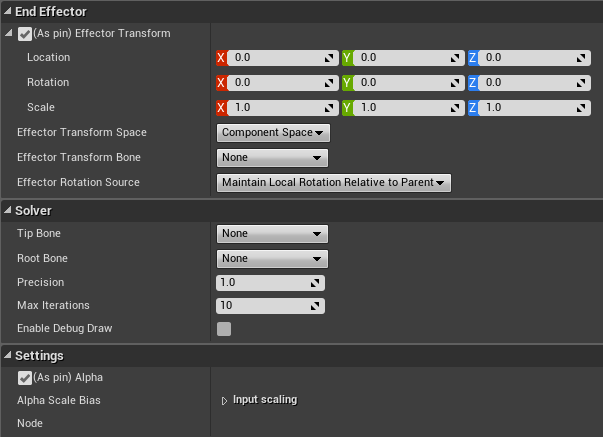
End Effector セクションでは、ターゲットの位置と回転を決定します。
| プロパティ | 説明 |
|---|---|
| Location, Rotation, Scale | 先端ボーンのターゲット位置の座標 - EffectorLocationSpace がボーンの場合、ターゲット位置として使用するTarget Bone からのオフセットです (ノード上のピンとして設定することも可能)。 |
| Effector Transform Space | SkeletalMesh コンポーネントの参照フレームのボーン位置を設定します。 |
| Effector Transform Bone | EffectorTransformSpace がボーンの場合、使用するボーンです。 |
| Effector Rotation Source | 回転を制御します (コンポーネント空間、ローカル空間を維持する、またはエンド エフェクタのターゲットの回転をマッチさせます)。 |
Solver セクションでは、Root から Tip まで、使用するボーンのチェーンを定義します。Tip は、エンド エフェクタの位置まで到達しようとします。
| プロパティ | 説明 |
|---|---|
| Tip Bone | 先端ボーン (利用可能なボーンから選択) を設定します。 |
| Root Bone | ルートボーン (利用可能なボーンから選択) を設定します。 |
| Precision | EffectorLocation からの最終先端位置デルタの許容値。値が低いほど、End Effector ターゲットに対して精度が高くなりますが、負荷は高くなります。 |
| Max Iterations | パフォーマンスを制御し、エッジケースでフレームレートが低下しないようにする許容可能なイタレーションの最大数。 |
| Enable Debug Draw | ジョイントの回転をデバッグするために軸の描画を切り替えます。 |
[Settings] セクションで、適用する強度を設定します。
| プロパティ | 説明 |
|---|---|
| Alpha | スケルタル制御の現在の強度 (ノード上のピンとして設定することも可能)。 |
| Alpha Scale Bias | 最小および最大の入力スケール値。 |
| Node | Effector Rotation Source が Local Rotation Relative to Parent 以外に設定されている場合に、Effector Rotation Source をリセットするために使用できます。 |