Physics Constraint (피직스 컨스트레인트)의 프로퍼티를 주요 카테고리별로 분류해 놓은 레퍼런스입니다.
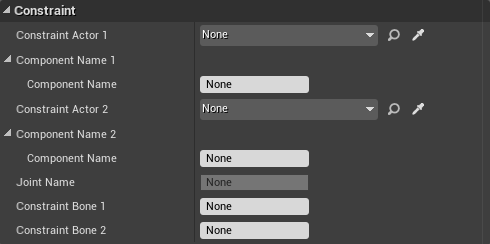
Constraint
| 프로퍼티 | 설명 |
|---|---|
| Constraint Actor 1 | 컨스트레인트 액터 1 - 레벨 에디터에서 피직스 컨스트레인트 를 배치할 때, 반드시 제약시킬 액터 를 지정해야 합니다. 그 두 액터 중 첫 번째입니다. |
| Component Name 1 | 컴포넌트 이름 1 - 제약시킬 첫 번째 대상 컴포넌트입니다. 액터 를 사용할 때 액터 루트가 아닌 특정 컴포넌트만 제약시키고자 할 때 지정하면 됩니다. |
| Constraint Actor 2 | 컨스트레인트 액터 2 - 레벨 에디터에서 피직스 컨스트레인트 를 배치할 때, 반드시 제약시킬 액터 를 지정해야 합니다. 그 두 액터 중 두 번째입니다. |
| Component Name 2 | 컴포넌트 이름 2 - 제약시킬 두 번째 대상 컴포넌트입니다. 액터 를 사용할 때 액터 루트가 아닌 특정 컴포넌트만 제약시키고자 할 때 지정하면 됩니다. |
| Joint Name | 조인트 이름 - 피직스 애셋 툴 에서 컨스트레인트 작업을 할 때, 초기에 제약시킬 본 이름입니다. |
| Constraint Bone 1 | 컨스트레인트 본 1 - 피직스 애셋 툴 에서 컨스트레인트 작업을 할 때, 제약시킬 첫 번째 조인트 이름입니다. |
| Constraint Bone 2 | 컨스트레인트 본 2 - 피직스 애셋 툴 에서 컨스트레인트 작업을 할 때, 제약시킬 두 번째 조인트 이름입니다. |
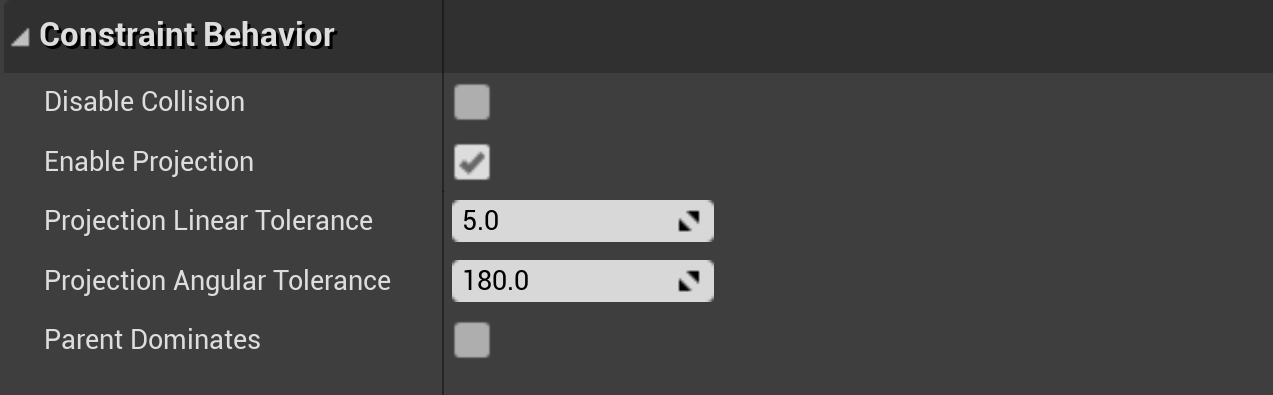
Constraint Behavior
| 프로퍼티 | 설명 |
|---|---|
| Disable Collision | 콜리전 끄기 - 제약된 컴포넌트 사이의 콜리전을 끕니다. |
| Enable Projection | 프로젝션 켜기 - 거리 오차가 Projection Linear Tolerance 값을, 또는 회전 오차가 Projection Angular Tolerance 값을 초과하는 경우, 이에 대한 프로젝션으로 픽스합니다. 이렇게 하면 개별 체인 링크가 서로 끊어져 보이는 등 시각적으로 단절된 경우를 고칠 수 있습니다. |
| Projection Linear Tolerance | 프로젝션 직선 허용치 - 월드 유닛 단위 거리 오차가 이 값을 넘어가는 경우, 바디를 프로젝션 합니다. |
| Projection Angular Tolerance | 프로젝션 각 허용치 - 각도 단위 각 오차가 이 값을 넘어가는 경우, 바디를 프로젝션 합니다. |
| Parent Dominates | 부모 우세 - 설정하면, 컨스트레인트의 부모 바디는 자식의 모션에 영향받지 않습니다. |
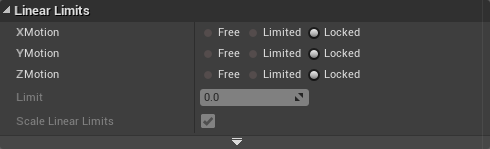
Linear Limits
| 프로퍼티 | 설명 | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| XMotion | X 모션 - X 축에 적용되는 선형 컨스트레인트를 나타냅니다.
|
||||||||
| YMotion | Y 모션 - Y 축에 적용되는 선형 컨스트레인트를 나타냅니다.
|
||||||||
| ZMotion | Z 모션 - Z 축에 적용되는 선형 컨스트레인트를 나타냅니다.
|
||||||||
| Limit | 한계 - 두 조인트 좌표계 사이에 허용되는 거리입니다. | ||||||||
| Scale Linear Limits | 직선 한계 스케일 - true 면 소유 컴포넌트의 3D 스케일 최소치 절대값을 사용하여 직선 한계에 스케일을 적용합니다. |
고급
| 프로퍼티 | 설명 |
|---|---|
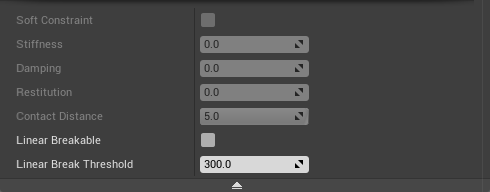
| Soft Constraint | 소프트 컨스트레인트 - 소프트 컨스트레인트 (스프링) 사용 여부입니다. |
| Stiffness | 강성 - 소프트 컨스트레인트의 강성입니다. 소프트 컨스트레인트가 켜져있을 때만 사용됩니다. |
| Damping | 제동 - 소프트 컨스트레인트의 제동입니다. |
| Restitution | 탄성 - 컨스트레인트가 침범했을 때의 탄성을 조절합니다. |
| Contact Distance | 접근 거리 - 한계에 얼마나 근접해야 조인트를 켤 수 있을지를 결정합니다. |
| Linear Breakable | 직선 파괴가능 - 직선 힘으로 조인트를 파괴할 수 있을지 여부입니다. |
| Linear Break Threshold | 직선 파괴 한계치 - 거리 컨스트레인트 파괴에 필요한 힘입니다. |
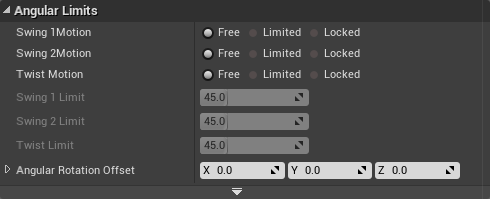
Angular Limits
| 프로퍼티 | 설명 | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Swing 1Motion | 스윙 1 모션 - Swing1 제한 사용 여부를 나타냅니다.
|
||||||||
| Swing 2Motion | 스윙 2 모션 - Swing2 제한 사용 여부를 나타냅니다.
|
||||||||
| Twist Motion | 트위스트 모션 - Twist 제한 사용 여부를 나타냅니다.
|
||||||||
| Swing 1Limit Angle | 스윙 1 한계 각도 - XY 면에서의 이동 각도입니다. | ||||||||
| Twist Limit Angle | 트위스트 한계 각도 - XZ 면에서의 이동 각도입니다. | ||||||||
| Swing 2Limit Angle | 스위 2 한계 각도 - X 축으로의 대칭형 롤 각도입니다. |
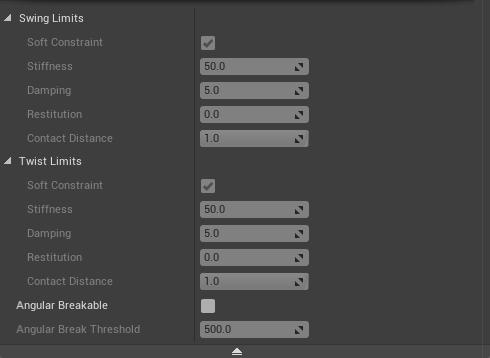
고급
| 프로퍼티 | 설명 |
|---|---|
| Swing Limits | |
| Soft Constraint | 소프트 컨스트레인트 - 소프트 컨스트레인트 (스프링) 사용 여부입니다. |
| Stiffness | 강성 - 소프트 컨스트레인트의 강성입니다. 소프트 컨스트레인트가 켜져있을 때만 사용됩니다. |
| Damping | 제동 - 소프트 컨스트레인트의 제동입니다. |
| Restitution | 탄성 - 컨스트레인트가 침범했을 때의 탄성을 조절합니다. |
| Contact Distance | 접근 거리 - 한계에 얼마나 근접해야 조인트를 켤 수 있을지를 결정합니다. |
| Twist Limits | |
| Soft Constraint | 소프트 컨스트레인트 - 소프트 컨스트레인트 (스프링) 사용 여부입니다. |
| Stiffness | 강성 - 소프트 컨스트레인트의 강성입니다. 소프트 컨스트레인트가 켜져있을 때만 사용됩니다. |
| Damping | 제동 - 소프트 컨스트레인트의 제동입니다. |
| Restitution | 탄성 - 컨스트레인트가 침범했을 때의 탄성을 조절합니다. |
| Contact Distance | 접근 거리 - 한계에 얼마나 근접해야 조인트를 켤 수 있을지를 결정합니다. |
| Breakable | |
| Angular Breakable | 각 파괴가능 - 회전력으로 조인트를 파괴할수 있는지 여부입니다. |
| Angular Break Threshold | 팍 파괴 한계치 - 조인트 파괴에 필요한 회전력입니다. |
Linear Motor

| 프로퍼티 | 설명 |
|---|---|
| Position Target | 위치 목표 - 하나 이상의 축에서 위치 선형 모터를 켜고, 원하는 로컬 위치를 설정합니다. |
| Strength | 세기 - 원하는 위치에 도달하기 위해 적용시킬 힘의 양입니다. |
| Velocity Target | 속도 목표 - 하나 이상의 축에서 속도 선형 모터를 켜고 원하는 속도를 설정합니다. |
| Strength | 세기 - 원하는 속도에 도달하기 위해 적용시킬 힘의 양입니다. |
고급

| 프로퍼티 | 설명 |
|---|---|
| Max Force | 최대 힘 - 구동력 힘 한계입니다. |
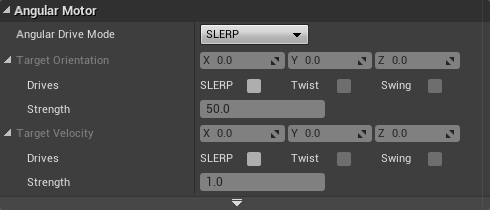
Angular Motor
| 프로퍼티 | 설명 | ||||||
|---|---|---|---|---|---|---|---|
| Angular Drive Mode | 각 구동 모드 - 이 각 모터에서 SLERP (Sphereical Linear Interpolation, 구체형 선형 보간)을 사용할지, Swing Motor 및 Twist Motor (콘 및 롤 컨스트레인트)로 분해할지 여부입니다. 각 컨스트레인트가 잠긴 경우 SLERP 는 작동하지 않습니다.
|
||||||
| Target Orientation | 목표 방향 - 바디 좌표계를 기준으로 한 목표 방향입니다. | ||||||
| Drives | 구동 - Angular Drive Mode 세팅에 따라, 해당 모드의 다양한 모터를 켜고 끌 수 있습니다. | ||||||
| Strength | 세기 - 목표 방향에 도달하기 위해 적용할 힘입니다. | ||||||
| Target Velocity | 목표 속도 - 바디 좌표계 기준 목표 각 속도입니다. | ||||||
| Drives | 구동 - Angular Drive Mode 세팅에 따라, 해당 모드의 다양한 모터를 켜고 끌 수 있습니다. | ||||||
| Stength | 세기 - 목표 속도에 도달하기 위해 적용할 힘입니다. |
고급

| 프로퍼티 | 설명 |
|---|---|
| Max Force | 최대 힘 - 구동력 힘 한계입니다. |