
点群 は、通常3Dスキャナを使用した建築や産業向けアプリケーションで取得されるデータポイントの集合です。点群は、3Dモデルとレーザースキャンデータを重ね合わせる必要のあるデザインビジュアライゼーションの専門家やメーカー、セットデザイナー、建設業者によって使用されます。
点群はオブジェクトとして Twinmotion にインポートされ、現況(実世界)のレーザースキャンデータと計画データ(3Dモデル)を比較、集計し、プロジェクト全体のすべてのコンポーネントを一度に表示する機能を提供します。
仕組み
点群は、建物など、地質学的領域やオブジェクトの物理的特性をスキャンし測定する、3Dスキャナや写真測量ソフトを使用して作成されます。3Dスキャナや写真測量ソフトは、対象物やエリアをスキャンし、さまざまな場所から正確な測定値を作成します。そして、その情報をデータポイントの集合に変換し、各点はXYZ幾何学的座標によって定義されます。さらに、これらの技術では、オプションとして色と法線ベクトルの方向情報を収集することができます。その後、すべてのデータポイントを集約して点群を作成し、3Dモデリングソフトウェアにインポートして、物体やエリアを正確に表現することができます。
点群を使用する場合の一般的なワークフローは次のとおりです:
- 対象箇所を3Dレーザースキャナでスキャンします。様々な場所や角度から複数回スキャンします。
- スキャン中に取得したデータポイントを使用して3D点群処理ソフトウェア、または3Dスキャナベンダー固有のアプリケーションを使用して点群を作成します。
- 点群は、.las、.laz、.e57などのファイル形式で保存されます。
- そして、点群をオブジェクトとして Twinmotion にインポートします。
サポートされている点群のファイル形式
Twinmotion がサポートしている点群ファイル形式は以下のとおりです:
| ファイル形式 | 説明 |
|---|---|
.e57 |
多くの場合は3Dスキャナで取得された点群、画像、メタデータなどの3D画像データを保存、交換するためのオープンソースのコンパクトなファイル形式です。 macOS では |
.las、 .laz |
LAS は、ユーザー間で 3D レーザースキャンされた点群データを交換するために使用される、一般的なオープンソースのバイナリファイル形式です。 LAZ ファイル形式は圧縮された LAS ファイルです。 LAZ ファイルは LAS ファイルよりも小さいですが、インポートに時間がかかります。 Twinmotion は、8ビット、12ビット、16ビットの LAS および LAZ ファイルをサポートしています。 |
.xyz、 .txt、 .pts |
ASCII は、X,Y,Z 点座標、または X,Y,Z 点座標と RGB カラーを含む点群ファイル形式です。 |
Twinmotion の機能との統合
点群はオブジェクトとしてTwinmotionにインポートされるため、いくつかの例外を除き、オブジェクトと同じように取り扱われます。Twinmotionと点群の相互作用に関する主要な点は以下のとおりです。
非リアルなレンダリングスタイル
Twinmotion の プレゼンターモード や ローカルプレゼンテーション で点群を表示する場合、様々なレンダリングスタイルを点群に適用することができます。
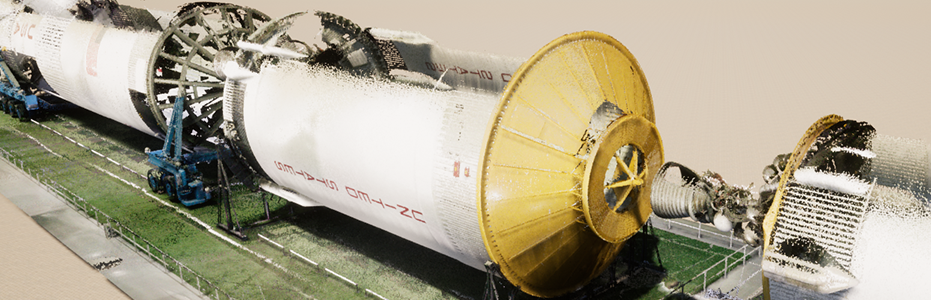

レンダリングスタイル オプションは 表示 メニューで見つけることができます。
コリジョンボリューム
コリジョンボリュームは、オブジェクトを囲み、オブジェクト同士の衝突や相互作用を決定する隠れた幾何学形状として定義することができます。点群オブジェクトを含むすべての Twinmotion オブジェクトはコリジョンボリュームを持っています。つまり、点群オブジェクトを選択したり、ライブラリから点群オブジェクトにオブジェクトをドラッグ&ドロップしたり、キャラクターが道を歩くなど、点群オブジェクトを考慮したアニメーションを追加したり、点群オブジェクトの色やカラープロパティを変更することができます。
点群オブジェクトにオブジェクトを配置する時の精度は、点群オブジェクトに適用されているコリジョンボリュームの精度に依存します。
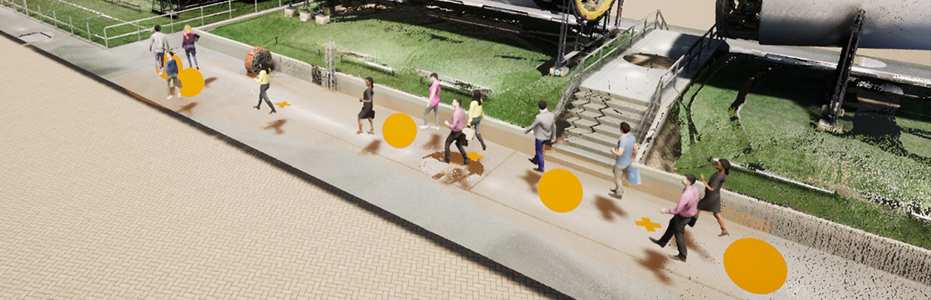
点群オブジェクト上のキャラクターパスのアニメーション
シャドウとライティング
点群オブジェクトは Twinmotion の動的な空による影や、シーン内の他のオブジェクトから投影される影の影響を受けます。例えば、 時刻 を変更すると、点群オブジェクトの影は、選択した時間帯によって変化します。

点群に影を落とすライブラリ オブジェクト

Twinmotion の動的な空による影
さらに、シーンの ビジュアル設定 にある 環境、露出、ホワイトバランス、太陽の強度、月の強度 及び 環境光 などの ライティング パラメータや Twinmotion ライブラリの ライト カテゴリから追加されたライトは、点群オブジェクトに影響を及ぼします。

Twinmotion ライブラリから点群に追加されたライト
ビジュアル設定の ライト パラメータに関しては、 「メディアのビジュアル設定」を参照してください。
デカール
Twinmotion ライブラリの デカール を点群オブジェクトに適用することができます。

点群オブジェクトに適用されたデカール
デカールの オフセット 設定は、デカールを適用する深さを参照します。点群オブジェクトにデカールを配置する場合、点群はジオメトリとしてではなく、データポイントの集合としてインポートされるため、最良の結果を得るにはオフセットの値を大きくすることをお勧めします。デフォルトでは、オフセット値は「0.01」から「100」の範囲で設定できますが、最大「1000」まで上書きすることができます。
デカールは、Twinmotionライブラリの Objects (オブジェクト) フォルダにあります。
セクションキューブ
Twinmotion の Section Cube(セクションキューブ) ツール を使用すれば、オブジェクトやオブジェクトの一部を切り取ったり非表示にしたりできます。 Section Cube ツールは、ジオメトリおよび点群オブジェクトで使用できます。
Section Cube の マスクの断面 設定で、点群のみ、、ジオメトリのみ、またはその両方を非表示にするかどうかを選択できます。
Section Cube は、 Tool (ツール) > Sections (断面) にあります。
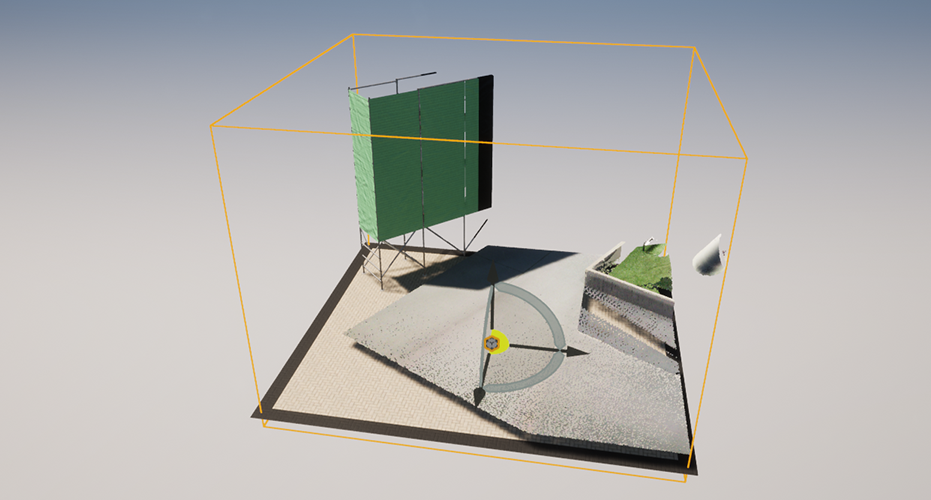
Section cube を使用してオブジェクトと点群オブジェクトの一部を非表示にする
メジャーツール
Measure tool ( ライブラリの Tools(ツール) > Measure(メジャー) ) は、シーン内のオブジェクトやオブジェクト間の距離の測定に使用できます。点群オブジェクトにも使用できますが、測定の精度は点群オブジェクトを取り囲むコリジョンボリュームの精度に依存します。
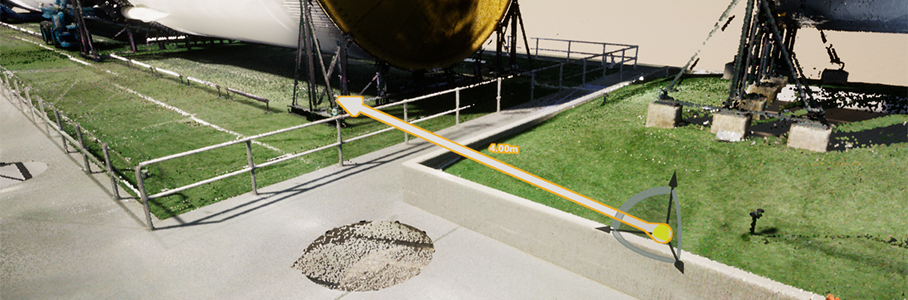
Twinmotion のメジャーツール
VR
点群オブジェクトはバーチャルリアリティ (VR) でも見ることができますが、 VR モード の表示品質はVRヘッドセットによって設定された1秒あたりのフレーム数(fps)に依存するため、VRヘッドセット内でシーンを移動すると、点群のデータポイントの表示状態や大きさが変化する場合があります。
リフレクションプローブ
Reflection Probe(リフレクションプローブ) は、Twinmotion の スクリーンスペースリフレクション (SSR) 限界を超え、反射を改善するために使用されます。Reflection Probe を使用した場合、点群オブジェクトは正しく反射されます。
Twinmotionファイルのマージ
別々の Twinmotion ファイルをマージして、1つの Twinmotion ファイルとして保存することができます。点群オブジェクトを含む Twinmotion ファイルは、他の Twinmotion ファイルとマージすることができます。
ローカルプレゼンテーション
プレゼンテーション_ 内の 静止画、動画、 パノラマ に含まれる点群は、 ローカルプレゼンテーション にエクスポートすることができます。
リソース収集
Twinmotion の Resource Collector(リソース収集) を使用すると、Twinmotion プロジェクトで使用されているテクスチャやアセットを、.tm ファイルと共に1つのパッケージ化されたZIPファイルに収集できます。Twinmotion プロジェクトで使用されている点群オブジェクトも、ZIPファイルに含まれます。
カメラの設定のビジュアル設定
Camera(カメラ) のビジュアル設定 —視野角 (FoV)、被写界深度 (DoF)、視差、口径食、レンズフレア、ビジュアル効果、シーンの状態— は点群オブジェクトに適用することができます。

カメラ設定に関する詳細は、「メディアのビジュアル設定」を参照してください。
点群プロパティ
以下の点群プロパティは Twinmotion で変更することができます。
| プロパティ | 説明 | |
|---|---|---|
| 点のサイズ | この設定は、点群内のすべてのデータポイントのサイズを変更します。データポイントどおしが近くにない場合、サイズを大きくすることで点群の表面を塗りつぶすことができます。このオプションを0に設定すると、カメラの距離やデータポイントの密度に関係なく、各データポイントは 1px の固定サイズを使用します。 オプション: 0.0 から 3.0。 値は上書きすることができます。 |
|
| 影を落とす | 点群が自己に影を落とすか、他のオブジェクトに影を落とすかどうかを決定します。 オプション: オン、オフ |
|
| 点の形状 | データポイントの形状を設定します。 オプション: 正方形、円 |
|
| 色のソース | 点群データの表示に使用するカラーソースを制御します。 単色: 点群データに単色を適用します。 Saturation(彩度)、Contrast(コントラスト)、Intensity(強度)、Tint(色合い) などの色のプロパティを変更することができます。 データ: 3Dスキャナで取り込んだ点群データに埋め込まれている色です。点群データに色が含まれていない場合は、白色で表示されます。 高度: 3Dスキャンした時のカメラ位置に関連する点群データの最高標高と最低標高を表示します。最高標高と最低標高は2色で表現され、最高標高と最低標高の間にある点は、2つの値の間のグラデーションで色付けされます。標高の最高点と最低点を表現するために使用される色の Tint(色合い) 、および Saturation(彩度)、 Contrast(コントラスト)、 Intensity(強度) など色のプロパティを調整することができます。 位置: スキャンを実行する際に3Dスキャナがデータポイントからどの程度近かったか遠かったかを表示します。近さは2つの色で表現され、最も近い領域と遠い領域の間の点は、2つの値の間のグラデーションを使用して色付けされます。カメラの近さを表すための色の Tint(色合い) 、および Saturation(彩度)、 Contrast(コントラスト)、 Intensity(強度) など色のプロパティを調整することができます。 オプション: 単色、データ、高度、位置 |
|
| 色のソース > 詳細 | 選択した色のソースの 彩度、コントラスト、強度、色合い を設定できます。 | |
| 衝突品質 | 衝突品質とは、点群データと3Dモデルやオブジェクトとの衝突をどの程度検知するかを設定するものです。3Dモデルやオブジェクトと点群データとの相互作用や衝突の程度に影響します。 オブジェクトと点群データを密接かつ正確に相互作用させる必要がない場合は、この設定は Low(低) に設定します。 High(高) の場合は計算コストが高くなります。 オプション: 低、高 |
点群エクスポート設定
点群オブジェクトを含むシーンをローカルにエクスポートする前に、Preferences(環境設定) パネルの [Quality (描画品質)] タブで、点群のレンダリング品質を Low(低) 、Medium(中) 、High(高) 、 Ultra(最高) のいずれかに設定してください。 品質パラメータが高くなると、点群オブジェクトのレンダリング品質も向上しますが、レンダリングの処理時間が長くなり、VRAM の使用量も多くなります。
Preferences(環境設定) パネルの Quality(描画品質) タブにアクセスするには、 ハンバーガーメニュー をクリックして Preferences(環境設定) を選択し、 [Quality (描画品質)] をクリックします。
点群の制限事項
Twinmotionの点群オブジェクトには以下の制限事項があります。
- 点群オブジェクトは Twinmotion で変更できません: 点の削除や点群オブジェクトをマージすることはできません。
- Datasmith エクスポータープラグインは、現在点群オブジェクトをサポートしていません。Revit や Archicadなどの一部のアプリケーションでは点群の表示が可能ですが、Datasmith エクスポータープラグインでは変換されません。Twinmotionで個別に読み込む必要があります。
- パストレーサーは、ポイントクラウドオブジェクトをサポートしていません。 点群ファイルを含むプロジェクトでパストレーサーを有効にすると、点群ファイルは非表示になります。
- プレゼンテーションに含まれる点群オブジェクトは、Twinmotion Cloud にエクスポートできません。点群を含むプレゼンテーションを Twinmotion Cloud にアップロードした場合、点群オブジェクトはプレゼンテーションに表示されません。
- 点群オブジェクトは Twinmotion ライブラリに保存できません。