LiDAR 포인트 클라우드(LiDAR Point Cloud) 플러그인 은 다양한 배색과 셰이딩 기법을 지원합니다. 포인트 클라우드의 변경과 시각화가 런타임 시에도 쉽고 빠르게 수행됩니다.
퍼포먼스
주로 글로벌 포인트 버짓(Global Point Budget)이 퍼포먼스를 관장하며, 한 번에 표시할 수 있는 최대 포인트 수를 설정합니다. 컴포넌트별 버짓과 반대되는 공유 버짓을 사용하는 경우 수많은 에셋을 동시에 효과적으로 렌더링할 수 있습니다. 이는 시스템이 현재 보이는 모든 포인트 중에서 최고의 포인트를 선택하기 때문입니다. 버짓 수치가 높을수록 퀄리티도 높아지지만 퍼포먼스 비용이 그만큼 증가합니다. 글로벌 포인트 버짓은 VRAM 사용량을 줄이고 프레임 속도에 도움을 주지만, 전체적인 RAM 사용량을 줄여주지는 않습니다.
온디맨드 스트리밍
포인트 클라우드를 열면 필요한 헤더 정보만 로드되고, 실제 벌크 데이터는 필요에 따라 스트리밍됩니다. 그 결과 에셋 로드 시간이 빨라지고 총 RAM 소모량이 최소화됩니다.
에디터는 에셋의 메모리를 자동으로 릴리즈하지 않습니다. 해당 에셋의 스트리밍을 활용하려면 저장 후 에디터를 다시 실행해야 합니다. 이는 새로 임포트되었거나 업그레이드된 레거시 에셋 둘 다에 해당됩니다.
포인트 클라우드 데이터를 파싱하고 해당 데이터를 언리얼 에셋으로 처리하는 경우 엔진에서 다수의 포인트 클라우드 파일을 로드하려면 여전히 상당한 양의 RAM이 필요합니다. 예를 들어 언리얼에서 로드된 이 몬트리올 시의 퍼블릭 LiDAR 데이터는 다음과 같은 퍼포먼스 지표를 보여줍니다:
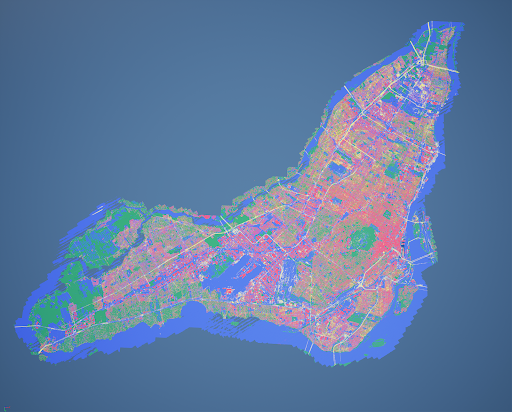
| 개별 LAS 파일 | 약 684개의 타일, 디스크 총 용량 253GB |
| 언리얼 RAM 사용량 | 100만 포인트 버짓당 약 3.5GB 사용 |
| 프레임 레이트 | 글로벌 버짓 수 100만 포인트 기준 120FPS |
| 총 포인트 수 | 1km*1km 타일당 평균 1430만 포인트 x 파일 621개 = 약 89억 포인트 |
포인트 크기(모든 포인트에 균등한 배수 적용)와 포인트 크기 편향치(LOD당 스케일링 적용 방식에 영향을 줌)를 높이면 낮은 밀도(적은 버짓 선택 시)가 어느 정도 완화됩니다.
에셋에 쓸 버짓이 작고 총 컴포넌트 수가 많을 때 포인트 클라우드 에셋이 사라졌다 나타나는 경우가 있습니다. 이를 방지하기 위해 LOD 시스템은 카메라에서 멀리 떨어진 에셋에 최소 퀄리티의 LOD라도 할당하려고 적극 시도합니다.
포인트 클라우드 임포트하기
다음 두 가지 방법 중 하나로 새 에셋을 임포트할 수 있습니다:
지원되는 파일 포맷(XYZ, TXT, PTS, LAS)으로 저장된 포인트 클라우드를 콘텐츠 브라우저 에 드래그 앤 드롭합니다.
콘텐츠 브라우저 에서 임포트 를 선택하고 원하는 파일로 이동합니다.
파일을 임포트하면 미터가 UU(100배)로 변환됩니다. 이 부분은 프로젝트 세팅에서 변경할 수 있습니다.
포인트 클라우드 익스포트하기
포인트 클라우드 에셋은 기존 언리얼 익스포트 툴 을 사용하여 ASCII나 LAS 파일로 익스포트할 수 있습니다.
익스포트 시 UU는 다시 미터로 변환됩니다(0.01배). 이 부분은 프로젝트 세팅에서 변경할 수 있습니다.
포인트 클라우드 편집하기

중앙(Center) 및 원본 좌표(Original Coordinates) 간에 토글하면 중앙 부근으로 포인트 클라우드 데이터의 중앙이 재설정됩니다. 이는 포인트 클라우드 데이터가 모델의 원점에서 멀리 떨어진 좌표로 정의된 경우에 유용합니다.
포인트는 개별적으로 삭제, 병합, 숨김, 추출이 가능합니다.