このページでは、物理コンストレイントのプロパティのリファレンスを主要カテゴリ別に一覧表示します。
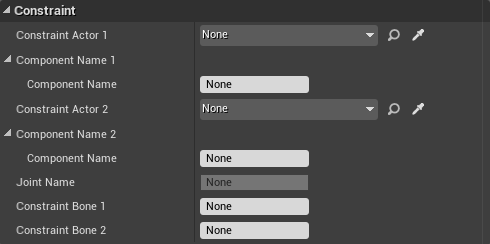
コンストレイント
| プロパティ | 説明 |
|---|---|
| Constraint Actor 1 | 物理コンストレイント をレベル エディタに配置する場合、拘束する アクタ を指定しなければなりません。これは 2 つある アクタ のうちのひとつです。 |
| Component Name 1 | コンストレイントの対象になる、ひとつめのターゲット コンポーネントです。これは、アクタ を使って アクタ のルートではなく、特定のコンポーネントのみを拘束する場合に指定します。 |
| Constraint Actor 2 | 物理コンストレイント をレベル エディタに配置する場合、拘束する アクタ を指定しなければなりません。これは 2 つめの アクタ です。 |
| Component Name 2 | コンストレイントの対象になる、 2 つめのターゲット コンポーネントです。これは、アクタ を使って アクタ のルートではなく、特定のコンポーネントのみを拘束する場合に指定します。 |
| Joint Name | Physics Asset Tool で拘束する場合、最初に拘束するボーン名になります。 |
| Constraint Bone 1 | Physics Asset Tool で拘束する場合、拘束するひとつめのジョイントの名前になります。 |
| Constraint Bone 2 | Physics Asset Tool で拘束する場合、拘束するふたつめのジョイントの名前になります。 |
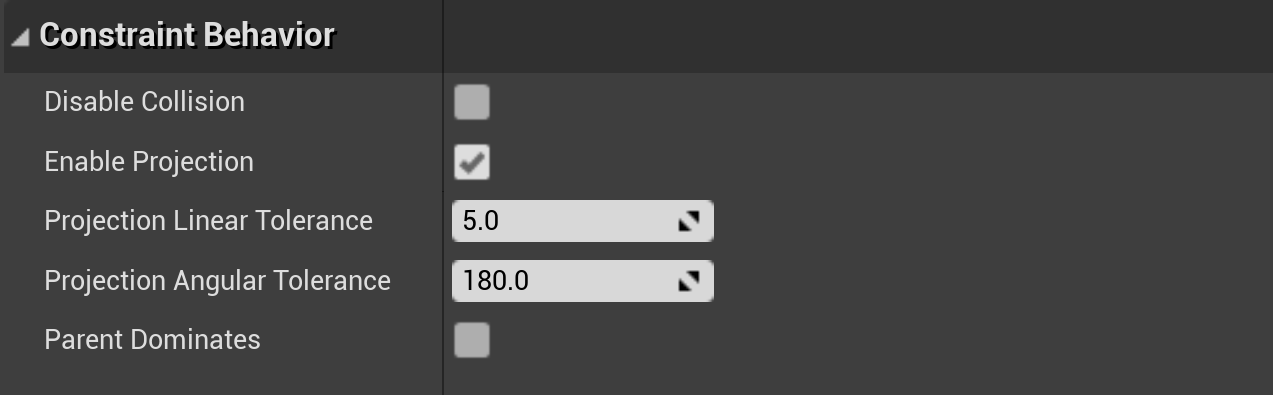
コンストレイントのビヘイビア
| プロパティ | 説明 |
|---|---|
| Disable Collision | 拘束したコンポーネント間のコリジョンを無効にします。 |
| Enable Projection | ボディ間の距離エラーが、 Projection Linear Tolerance 値を超える場合、または回転エラーが Projection Angular Tolerance を超える場合、物理ボディはこれを調整するために投影されます。これにより、個々のチェイン リンクが互いに離れているなどの視覚的なつながりのなさを修正します。 |
| Projection Linear Tolerance | 距離エラーがワールド単位でこの値を超えると、ボディが投影されます。 |
| Projection Angular Tolerance | 回転エラーがこの値を、度単位で超えるとボディが投影されます。 |
| Parent Dominates | 設定すると、コンストレイント内の親のボディは子の動きの影響を受けなくなります。 |
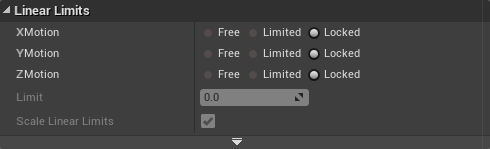
Linear Limits
| プロパティ | 説明 | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| XMotion | X-軸に沿って適用される線形コンストレイントを示します。
|
||||||||
| YMotion | Y-軸に沿って適用される線形コンストレイントを示します。
|
||||||||
| ZMotion | Z-軸に沿って適用される線形コンストレイントを示します。
|
||||||||
| Limit | 2 つのジョイントの基準座標系間で認められる距離。 | ||||||||
| Scale Linear Limits | true の場合、所有するコンポーネントの 3D スケールの絶対最小値を使った linear limit のスケールです。 |
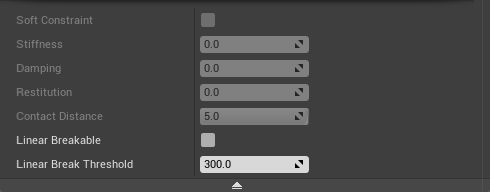
上級者向け
| プロパティ | 説明 |
|---|---|
| Soft Constraint | ソフト コンストレイント (スプリング) を使うかどうかを指定します。 |
| Stiffness | ソフト コンストレイントの剛性。ソフト コンストレイントがオンのときのみ使用します。 |
| Damping | ソフト コンストレイントの減衰。 |
| Restitution | コンストレイントに違反した場合の反発量を制御します。 |
| Contact Distance | ジョイントをオンにする前に、どれくらい制限に近づかなければならないかを決めます。 |
| Linear Breakable | ジョイントを線形の力でブレイクすることが可能かどうかを指定します。 |
| Linear Break Threshold | 距離のコンストレイントをブレイクするために必要な力です。 |
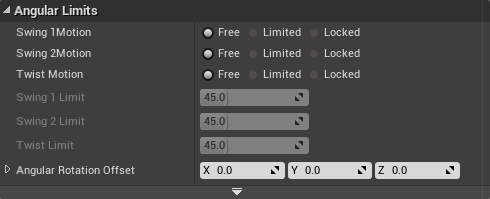
Angular Limits
| プロパティ | 説明 | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Swing 1Motion | Swing1 の制限を使用するかどうかを示します。
|
||||||||
| Swing 2Motion | Swing2 の制限を使用するかどうかを示します。
|
||||||||
| Twist Motion | Twist の制限を使用するかどうかを示します。
|
||||||||
| Swing 1Limit Angle | XY プレーンに沿った動きの角度。 | ||||||||
| Twist Limit Angle | XZ プレーンに沿った動きの角度。 | ||||||||
| Swing 2Limit Angle | X-軸に沿ったロール (進行軸回転) の対称角度 |
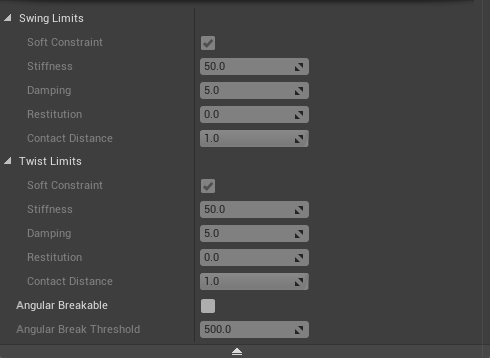
上級者向け
| プロパティ | 説明 |
|---|---|
| Swing Limits | |
| Soft Constraint | ソフト コンストレイント (スプリング) を使うかどうかを指定します。 |
| Stiffness | ソフト コンストレイントの剛性。ソフト コンストレイントがオンのときのみ使用します。 |
| Damping | ソフト コンストレイントの減衰。 |
| Restitution | コンストレイントに違反した場合の反発量を制御します。 |
| Contact Distance | ジョイントをオンにする前に、どれくらい制限に近づかなければならないかを決めます。 |
| Twist Limits | |
| Soft Constraint | ソフト コンストレイント (スプリング) を使うかどうかを指定します。 |
| Stiffness | ソフト コンストレイントの剛性。ソフト コンストレイントがオンのときのみ使用します。 |
| Damping | ソフト コンストレイントの減衰。 |
| Restitution | コンストレイントに違反した場合の反発量を制御します。 |
| Contact Distance | ジョイントをオンにする前に、どれくらい制限に近づかなければならないかを決めます。 |
| Breakable | |
| Angular Breakable | ジョイントを角度の力でブレイクすることが可能かどうかです。 |
| Angular Break Threshold | ジョイントをブレイクするために必要なトルク (回転力)。 |
Linear Motor

| プロパティ | 説明 |
|---|---|
| Position Target | ひとつ以上の軸上の位置の線形モーターを有効にし、望ましいローカルの位置を設定します。 |
| Strength | 望ましい位置に到達するためにどの程度の力を適用するかです。 |
| Velocity Target | ひとつ以上の軸上でベロシティ線形モーターを有効にし、望ましいべロシティを設定します。 |
| Strength | 望ましいベロシティに到達するためにどの程度の力を適用するかです。 |
上級者向け

| プロパティ | 説明 |
|---|---|
| Max Force | 動きの力の制限です。 |
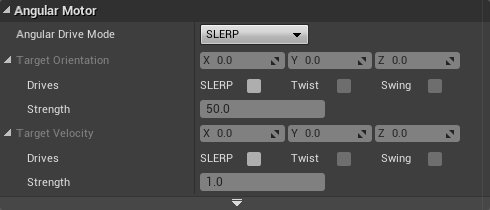
Angular Motor
| プロパティ | 説明 | ||||||
|---|---|---|---|---|---|---|---|
| Angular Drive Mode | この角度モーターが SLERP (Spherical Linear Interpolation、球面線形補間) を使うか、Swing Motor と Twist Motor (コーンおよびロール (進行軸回転) のコンストレイント) に分解するかです。角度コンストレイントがひとつでもロックされると SLERP は機能しません。
|
||||||
| Target Orientation | ボディの基準座標系に相対的なターゲットの方向 | ||||||
| Drives | Angular Drive Mode 設定に応じて、モードに対して異なるモーターを有効または無効にすることができます。 | ||||||
| Strength | ターゲットの方向に到達するために適用される力 | ||||||
| Target Velocity | ボディの基準座標系に相対的なターゲットの角速度 | ||||||
| Drives | Angular Drive Mode 設定に応じて、モードに対して異なるモーターを有効または無効にすることができます。 | ||||||
| Stength | ターゲットの速度に到達するために適用される力 |
上級者向け

| プロパティ | 説明 |
|---|---|
| Max Force | 動きの力の制限です。 |